Introducción y antecedentes
Desde el año 2009 la seguridad alimentaria y nutrición (SAN) ha sido una prioridad, por lo que se creó el Consejo Nacional de Seguridad Alimentaria y Nutricional (CONASAN) y su Comité Técnico Nacional (COTSAN) como entidades encargadas de la gestión de una política nacional en el tema, partiendo del reconocimiento del derecho a la alimentación como un derecho fundamental de toda persona.
Con este nuevo enfoque de la SAN, se busca ampliar la disponibilidad y el acceso a los alimentos, al mismo tiempo que se orienta el consumo alimentario y se sugiere formas más equitativas de producir y comercializar los alimentos.
A través del proyecto se hace una propuesta para automatizar un invernadero, lo que facilitaría la producción de los alimentos, haciendo uso de elementos de electrónica de hardware libre, por medio de arduino y una serie de sensores que permiten medir las variables del ambiente y activen una serie de dispositivos que logran mantener el ambiente en condiciones óptimas para el crecimiento de los cultivos.
Se describe el proceso utilizado para la construcción del invernadero, así como las pruebas realizas con los diferentes sensores y dispositivos de acción que permitieron el manejo controlado de las condiciones climáticas.
Justificación
Cada vez más se hacen evidentes los cambios climáticos que afectan los cultivos tradicionales y ponen en relieve el problema de la seguridad alimentaria y nutrición, pues a pesar de los esfuerzos por incentivar la producción de alimentos, siempre hay déficit. Por eso la necesidad de diseñar soluciones, que auxiliándose de la tecnología, faciliten los procesos de producción de alimentos, de ahí surge la idea de invernaderos automatizados como el propuesto, que controle las variables ambientales fundamentales para el crecimiento adecuado de las plantas utilizando hardware libre como arduino y una serie de sensores que accionen los dispositivos eléctricos automáticamente.
Objetivos
Objetivo General:
- Contribuir con la seguridad alimentaria y nutricional por medio de la propuesta de un invernadero automatizado, que permita el monitoreo y modificación de variables climáticas, facilitando la producción de alimentos en ambientes controlados.
Objetivos Específicos:
- Diseñar una propuesta de invernadero que por medio de sensores y componentes electrónicos manejados a través de arduino que realicen las acciones necesarias para el manejo de las condiciones climáticas.
- Integrar la informática a través de la programación con dispositivos electrónicos basados en hardware libre y componentes eléctricos de forma eficiente, para la creación de invernaderos automatizados.
Metodología
Para el desarrollo del invernadero automatizado se han utilizado diferentes materiales:
- Módulo de madera, que representa a escala un invernadero
- Arduino mega, para controlar los sensores
- Pantalla LCD para mostrar los indicadores de las variables ambientales
- Sensor de temperatura
- Sensor de humedad del ambiente
- Sensor de humedad del suelo
- Sensor de intensidad luminosa
- Bombillos
- Ventiladores de computadora
- Switches
- Bomba, para el sistema de riego
- Cables de diferentes tipos para las conexiones
- Breadboard
- Tierra
- Plantas
Equipos:
- Fuente
- Tester
- Taladro
- Computadora
Se realizó un diseño de la maqueta en el software Sketchup, para tener una idea clara de las dimensiones y distribución de los componentes que se utilizaron.
Se procedió a realizar la programación para manejar cada sensor, lo que implicaba programar los niveles necesarios de acuerdo a los criterios correspondientes según la naturaleza de cada uno, luego se agregó en la programación el código necesario para que permitiera realizar las acciones que le correspondería hacer como encender y apagar los ventiladores o activar y desactivar el sistema de riego del cultivo o encender y apagar los bombillos ya sea con el propósito de mejorar los niveles de luminosidad o la temperatura.
Luego de realizado el modelo de invernadero, incluyendo la pintura, adecuación de espacios y considerando que se habían hecho las pruebas de los sensores, se definió la forma de cubrirlo, considerando el espacio para los dispositivos que fueron instalados, además del llenado de la tierra.
Se procedió a ensamblar cada uno de ellos según el detalle:
Primero se colocó el sensor de temperatura, se instalaron los cables y dos ventiladores, que se activan cuando hay mucha temperatura, uno inyectará aire del ambiente y el otro será un extractor del aire caliente, además se colocaron dos bombillos que se activan cuando hay muy baja temperatura. Para el manejo de los dispositivos eléctricos se tuvo que utilizar un módulo de relés, pues el voltaje que se maneja es muy superior al que controla el arduino, para el caso de los bombillos grandes su alimentación es AC.
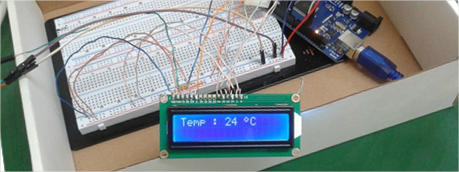
Se instaló la pantalla LCD lo que permite visualizar los resultados de las mediciones obtenidas por los sensores. Por lo que se programó que los sensores mandaran esos datos, así cada vez que ase agregaran había que actualizar el código para ir integrando las salidas mostradas.
Seguidamente se ubicó el sensor de humedad de suelo, así como el sistema de riego, esta fase fue bastante delicada, porque eso implicó la ubicación de la bomba de agua, así como la tubería apropiada para que al momento de activar el sistema permitiera regar adecuadamente las plantas, la acción de la bomba depende de los niveles que el sensor reporta según cómo fue programado.
En el caso del sensor de luz, se colocó en la parte superior para poder medir la cantidad de luz que entra al invernadero, pues si ese valor es menor del necesario se activan una serie de bombillos pequeños para mejorar la luminosidad.
Se realizaron las pruebas tanto unitarias por sensor como en su totalidad a manera de garantizar un funcionamiento óptimo, es decir que cada sensor mida las variables ambientales de manera adecuada, que sean mostradas en pantalla y sobre todo que accione los dispositivos eléctricos según corresponda y que los desactive oportunamente. En dichas pruebas se encontraron algunos detalles los cuales fueron identificados y corregidos tanto a nivel de programación como de ubicación y acoplamiento en la maqueta.
La integración de los códigos de programación para garantizar el buen funcionamiento de todo el sistema fue muy fundamental, porque eso permite que el invernadero sea realmente automático, facilitando la producción de los cultivos.
Resultados y discusión
La utilización de hardware libre promueve el desarrollo de aplicaciones en diferentes áreas, en este caso ha facilitado el diseño y desarrollo de un modelo a escala de un invernadero, porque se considera que el tema de la seguridad alimentaria y nutrición son de vital importancia, no solo por la situación climática que cada vez parece más preocupante por la falta de lluvia, sino también porque las tierras que tradicionalmente se han utilizado para la agricultura no están dando los resultados esperados y bajo las condiciones controladas de los invernadero es posible mejorar la producción de alimentos, sobre todo con la propuesta realizada ya que facilita la automatización de las acciones que permiten controlar las condiciones ambientales.
Tomando en consideración que los problemas de nutrición tienen repercusiones directas en la salud, crecimiento y desarrollo de las personas (como lo establece el resumen de la situación alimentaria y nutricional de El Salvador), es necesario plantear soluciones aplicadas a esta área.
La combinación de la informática a través de la programación y la electrónica basada en la filosofía del hardware libre a la cual pertenece la placa arduino, dio como resultado el proyecto del invernadero automatizado.
De manera tradicional el desarrollo tecnológico ha beneficiado con la automatización de procesos de producción industrial, en donde se han desarrollado máquinas robotizadas para ensamblar piezas, etc, pero para sectores como el agrícola se han visto menos favorecidos en la creación de tecnología relacionada al desarrollo de software y hardware para promover este sector, de ahí la importancia de haber desarrollado este proyecto, que tienen un trabajo integrado de la parte de la computación, por medio de la programación de los códigos, la utilización de componentes electrónicos basados en la filosofía del hardware libre, la cual incluye la idea de compartir los conocimientos para que sean mejor aprovechados por otros que también tengan la iniciativa de utilizarlos y finalmente el uso de los dispositivos eléctricos fundamentales para permitir realizar acciones, movimientos, cambios o alteraciones en las condiciones ambientales dentro del invernadero; todo lo anterior unido a la creatividad y el diseño de un modelo que integre armoniosamente todos los componentes para el logro de los resultados esperados.
La placa arduino mega (Ver Figura 1), la cual es un dispositivo, capaz de controlar una gran cantidad de variables análogas y salida digitales a través de sus pines, los cuales conectados a sensores que miden las variables ambientales hacen funcionar los actuadores, los cuales se encienden y apagan de acuerdo a las condiciones medidas y lo establecido en la programación.
La electrónica en donde se incluye el arduino mega y los sensores utilizados logran medir las condiciones ambientales del invernadero, pero esos componentes por sí solos no pueden realizar cambios, por eso fue necesario incluir los dispositivos eléctricos como bombillos, ventiladores y bomba, los cuales por su diseño requieren voltajes superiores a los que un arduino maneja en salida, los cuales son de 3.3 y 5v, así que para lograr una manipulación de los dispositivos eléctricos se utilizaron relés que permiten activar o desactivar en paso de corriente de equipos de mayor voltaje, sin poner en riesgo el circuito electrónico y los sensores. Esta alimentación se logró a través de fuentes de voltaje con salidas de 12V, para la mayoría de los dispositivos en DC, pero en el caso de los bombillos para generar calor utilizan la corriente alterna (AC), por lo tanto disponen de un suministro directo desde un toma corriente, este último aspecto resulta delicado por el manejo de 110V desde la red eléctrica, por lo cual es importante utilizar los materiales adecuados y los mecanismos de aislación de las líneas vivas de energía.

Figura 1. Esquema de la placa arduino mega 2560
Como se dijo antes los sensores necesitan activar o desactivar una serie de dispositivos eléctricos, cada uno de los cuales tiene el voltaje y corriente necesario para que funcione, pero espera la señal que el circuito electrónico le envíe, en general a la salida en otros dispositivos se le llama actuadores, los cuales se describen en la Tabla 1.
Tabla 1. Sensores y las acciones que realiza dependiendo de los niveles programados
| Sensor | Actuador |
| Humedad del suelo | Cuando haya muy poca humedad se activará el sistema de riego consistente en una bomba que a través de la tubería suministra el agua, lo que garantiza el nivel adecuado de humedad de las plantas. |
| Humedad ambiente | Muestra en pantalla el resultado. |
| Temperatura | Si la temperatura está muye levada, entonces acciona dos ventiladores, uno para inyectar aire del ambiente y el otro para extraer el aire caliente del interior. Si la temperatura está muy baja, entonces se encienden dos bombillos con el propósito de aportar calor. Todo se activa mientras se está fuera de los niveles establecidos |
| Luz | Cuando haya muy poca luz se encenderán unos pequeños bombillos distribuidos en el invernadero para que esté iluminado y compense la falta de luminosidad necesaria. |
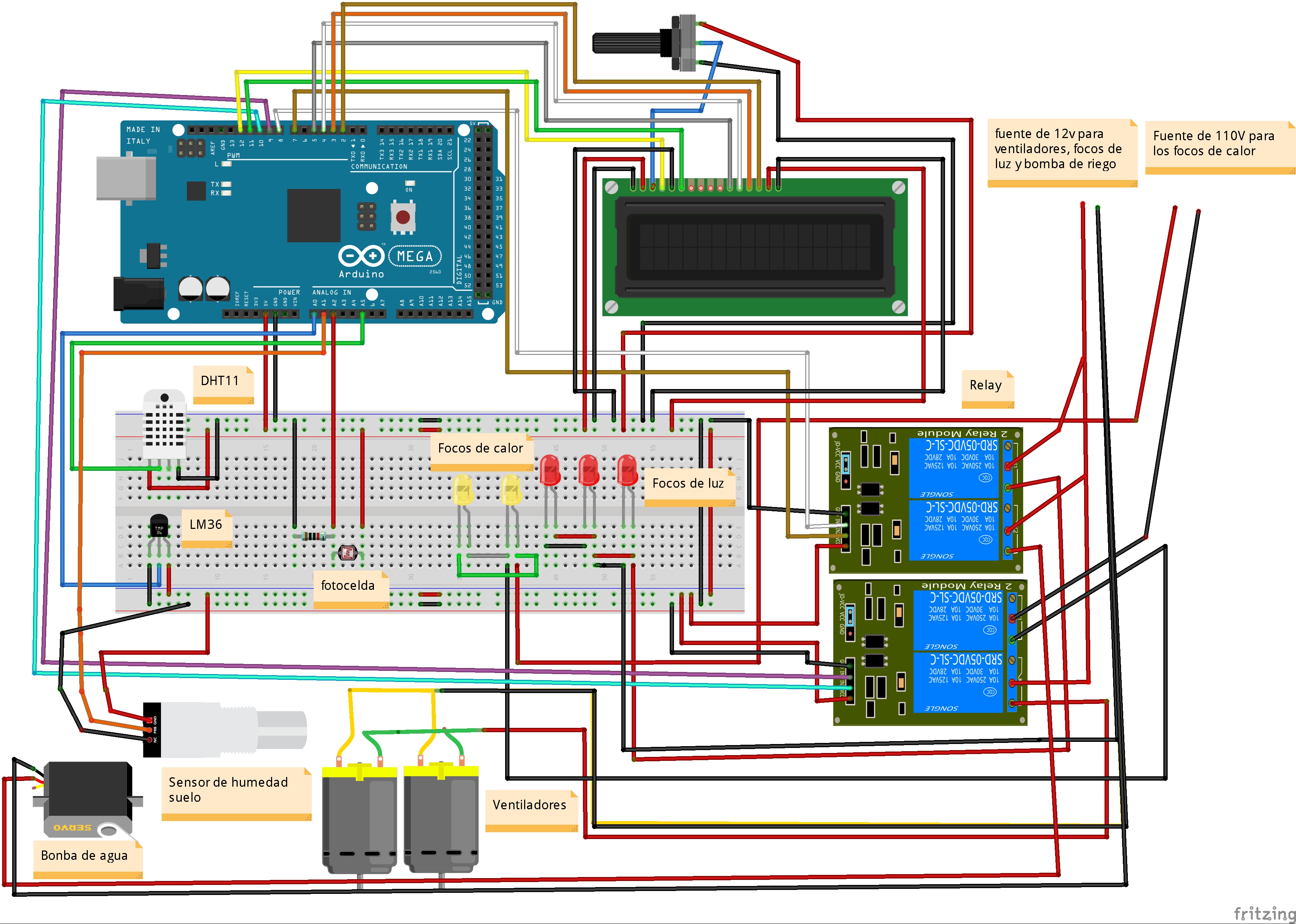
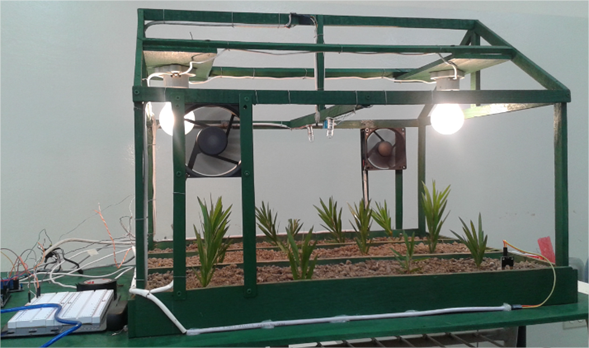
Los resultados obtenidos responden tanto a la lógica de programación como al diseño establecido tanto a nivel de circuito (Ver Figura 2), como al diseño en físico (ver Figura 3)
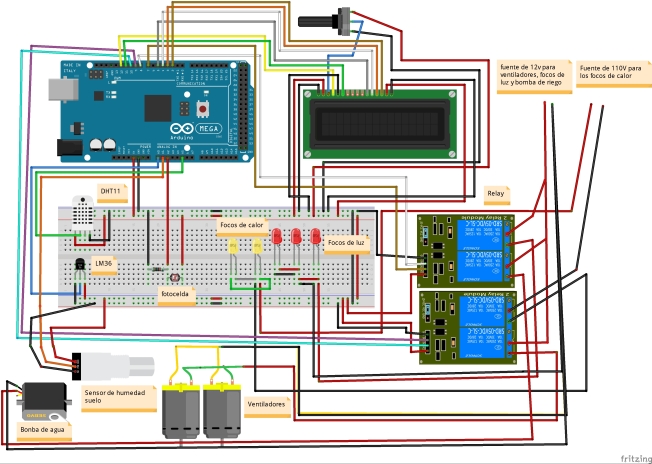
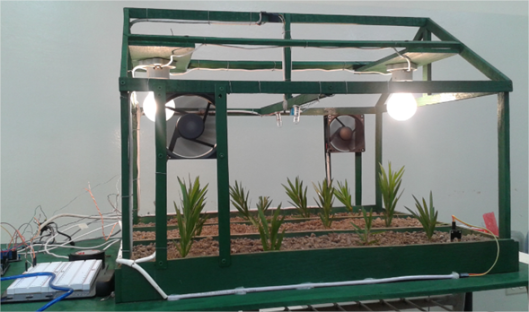
Figura 3. Vista panorámica lateral del modelo de invernadero.
Con el desarrollo del modelo del invernadero se pudieron obtener los siguientes resultados:
- Un control automatizado de las condiciones ambientales dentro del invernadero, considerando los sensores y actuadores descritos anteriormente y de los cuales se presenta un detalle individual de resultados para una mejor comprensión de cómo es que trabaja.
- Se pueden visualizar los resultados de los valores medidos por los sensores a través de pantallas LCD, lo que facilita tomar decisiones de parte de los especialistas, considerando también que según la programación de los sensores el circuito toma decisiones de acuerdo a los activadores que controla, pero sin duda que la intervención humana, pudiera también ser necesaria para efectos de monitorización de las variables ambientales, por eso el resultado de cada medición de los sensores es mostrado en pantalla (Ver Figura 4).
- El sensor de temperatura el cual se muestra en la Figura 5, hace activar un par de ventiladores, uno de los cuales hace ingresar aire desde el exterior y el otro está colocado de forma tal que expulse el aire caliente que esté dentro del invernadero en el caso de exceso de temperatura. De igual manera si ésta baja demasiado, se encenderán dos bombillos grandes para suministrar calor.

Figura 5. Ubicación del sensor de temperatura y de uno de los ventiladores
- El sensor de humedad del suelo está colocado dentro de la tierra (ver Figura 6) en el invernadero de manera que pueda medir de forma apropiada los niveles, para que con base a esos resultados se active la bomba y se efectúe el regado en el cultivo. Esto se hace por medio de una serie de tuberías colocadas de forma tal que permita cubrir el área total de la siembra.
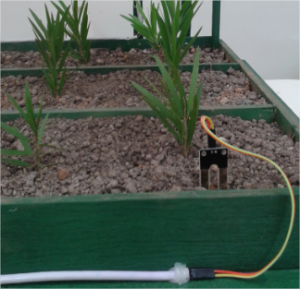
Figura 6. Ubicación del sensor de humedad del suelo
- El sensor de humedad del aire mostrará al igual que el resto los resultados en pantalla, para monitorear esta variable.
- En lo referido al sensor de luz (ver Figura 7), el cual fue colocado en la parte superior para medir la intensidad de luz, el cual hace encender unos pequeños bombillos, para compensar esa falta.

Figura 7. Sensor de LDR, ubicado en la parte superior.
- La integración de todos los componentes permitieron obtener un invernadero que trabaje de manera automática accionando los dispositivos necesarios para controlar el ambiente (ver Figura 8), algo necesario para el crecimiento de ciertos cultivos.

Figura 8. Representación de la integración del modelo con los componentes
Como consideraciones finales en la parte de discusión es de tomar en cuenta:
Puede decirse que la propuesta y resultados de este proyecto están justamente enmarcados en las líneas que rigen las políticas públicas que están encaminadas a garantizar la disponibilidad, acceso y consumo. Esperando con ello que el aporte sea tomado en consideración como mecanismo combinado de varias disciplinas del saber, pueda contribuir como una opción viable, que implementada contribuya con una mejor alimentación y nutrición para los salvadoreños, debido a la urgencia de buscar estrategias sostenibles y rentables en la producción de alimentos.
Conclusiones
El diseñar una propuesta de un invernadero que funcione de manera automatizada utilizando arduino, sensores, pantalla LCD y en general electrónica basada en hardware libre, ha sido de mucha satisfacción sobre todo porque se sabe de la necesidad que hay en el país de promover la producción de alimentos, tal como lo establece la política nacional de seguridad alimentaria y nutricional.
El aplicar la tecnología ha facilitado controlar el ambiente y condiciones necesarias para que el invernadero funcione, activando y desactivando dispositivos eléctricos como bombillos, motores, ventiladores. Es así como la informática y la electrónica pueden contribuir a solucionar problemas.